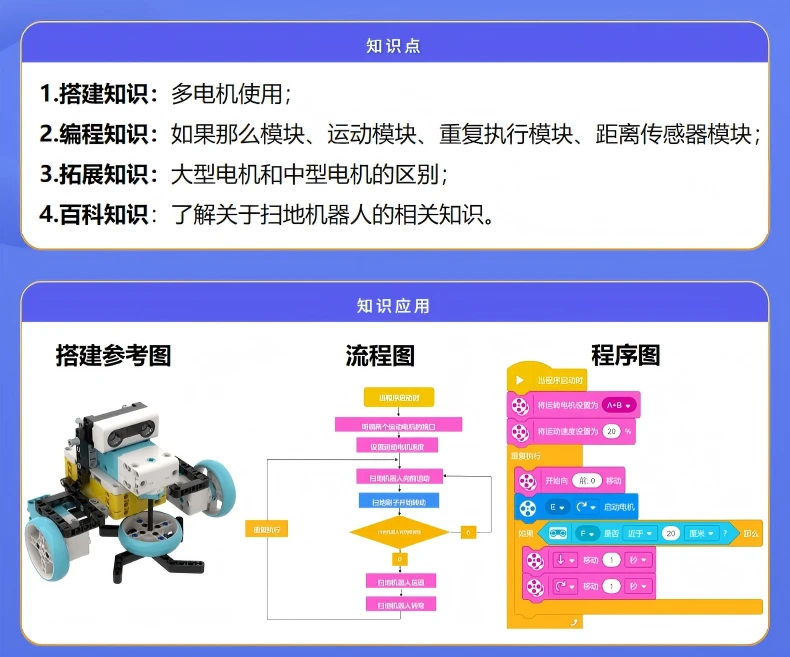
2025年9月6号SPIKE乐高机器人作业 通过本次做题来进行SPIKE知识掌握摸底测验。请作答的同学在第一题写上自己的名字哟【姓名不会泄露,只有老师和作答学生看到】,方便老师后台审阅! 请在此处写上宝贝的姓名即可 1 / 13 学生姓名: 检查 2 / 13 扫地机器人的扫地刷最核心的作用是什么? 改变车身颜色 装饰前轮 清理地面垃圾 控制后退 抽象思维需要知道:刷子是核心的执行任务器材,作用是清扫地面灰尘,因此选择C 3 / 13 抽象思维需要知道:刷子是核心的执行任务器材,作用是清扫地面灰尘,因此选择C 先做刷子 → 再做轮子 先做车身 → 装轮子 → 固定刷子 → 安装传感器 先做传感器 → 再做车身 先做电机 → 再做底座 分解思维要点:从主体到功能件,先有车身和轮子,才能保证刷子和传感器位置正确,因此选择B 4 / 13 扫地机器人遇到障碍后没能后退,最可能需要先检查哪里? 电机是否松动 距离传感器是否安装到位 车轮大小是否一致 刷子转速是否过快 排错思维就是先找核心问题:扫地机器人遇到障碍后退需要依赖距离传感器检测,如果传感器没固定好或方向装反,程序条件就无法触发,因此选择B 5 / 13 判断结构在程序中的主要作用是什么? 重复执行某个动作 控制机器人加速 根据条件决定是否执行某段程序 存储变量信息 判断结构常以“如果……那么……”的形式出现,用于根据传感器或变量的状态来控制程序分支,是编程的核心逻辑之一 6 / 13 顺序结构 循环结构 判断结构 并行结构 这是典型的判断结构:当某个条件成立(检测到红色)时才执行某个动作(播放声音)。 7 / 13 以下哪种情况最需要用到判断结构? 重复闪烁灯光 让机器人一直前进 按钮被按下时才开始执行任务 显示固定图案 “只有在某种条件下才执行某件事”就是判断结构的用途,像“按下按钮才启动”就是非常典型的触发判断逻辑。 8 / 13 如果你希望机器人在距离墙壁小于15厘米时自动停止,应如何设置程序? 使用颜色传感器判断 设置变量存储颜色 判断距离是否小于15厘米 → 停止移动 直接停止电机不判断 这是一种典型的条件判断控制,距离传感器检测到障碍物接近时触发停止动作,可避免碰撞,因此选择C 9 / 13 哪种任务最适合使用距离传感器完成? 检测红色或绿色积木 让机器人遇到障碍物时转弯 控制LED图案显示 播放启动音效 距离传感器能让机器人“看到前方物体”,适用于自动避障、墙前停止、物品识别等任务。 10 / 13 你希望机器人在前方物体距离小于10厘米时自动停止,否则继续前进,这种程序结构应该怎么设计? A B C D 这是典型的“传感器 + 条件判断”逻辑。通过距离传感器获取数值,再用判断结构控制行为,让机器人根据实际环境动态作出反应(避障),尤其要注意判断条件和执行的条件,检测到近处物体需要停止。D选项为检测到有物体前进,和题目要求不符合,因此选择C 11 / 13 运动模块主要控制机器人哪部分的运动? 单个电机的摆动 两个轮子的协调运动 灯光图案的变化 声音的播放 运动模块用于同时控制两个电机(通常是左右轮子),可以实现直行、转弯、倒退等机器人整体移动动作,因此选择B 12 / 13 下列哪种设置会使机器人原地左转? 左轮前进、右轮停止 两个轮子都向前 两个轮子都后退 左轮后退、右轮前进 当左右轮反向旋转时,机器人会原地转向;左轮后退、右轮前进就会实现原地向左转弯,因此选择D 13 / 13 运动模块的端口需要注意两点:1、电机的端口是否正确;2、电机左右位置是否正确 A B C D 运动模块的端口需要注意两点:1、电机的端口是否正确;2、电机左右位置是否正确 您的分数是 平均分为 0% 0% 重新开始测验 知识点复习 1.搭建知识:多电机使用; 2.编程知识:如果那么模块、运动模块、重复执行模块、距离传感器模块; 3.拓展知识:大型电机和中型电机的区别; 4.百科知识:了解关于扫地机器人的相关知识。 【流程图】 免责声明本站内容(教程、软件、资料等)仅供个人学习研究之用,严禁用于商业或非法目的,使用风险自负。博客部分内容来源自网络,版权归属原作者,本站不承担相关版权责任。请在试用下载后24小时内删除相关资源,支持正版。如涉及侵权,请通过邮件:gouweicaosheji#163.com与我联系处理。

 宗宗酱
宗宗酱







好专业啊!乐高都能搞的这么复杂!
@Huo 是的呀,现在学生卷的很!